|
Оборудование
Конфигурация
|
Платформа IPC
|
Процессор IPC
|
Сбор и обработка сенсорных данных, картографирование
вычисление вычислительной мощности для определения местоположения
|
|
LiDAR
|
C16
|
C16 Многолинейный LiDAR с широким диапазоном обнаружения
и высокой производительностью (Может быть адаптирован к другим
LiDAR)
|
|
Датчик опорного позиционирования
|
IMU
|
Fusion Positioning Supporting
|
|
Датчик опорного позиционирования
|
Одометр
|
Опора для позиционирования Fusion (опция)
|
|
Датчик опорного позиционирования
|
GPS
|
Наружная опора для позиционирования Fusion (опция)
|
|
Продукт
Функция
|
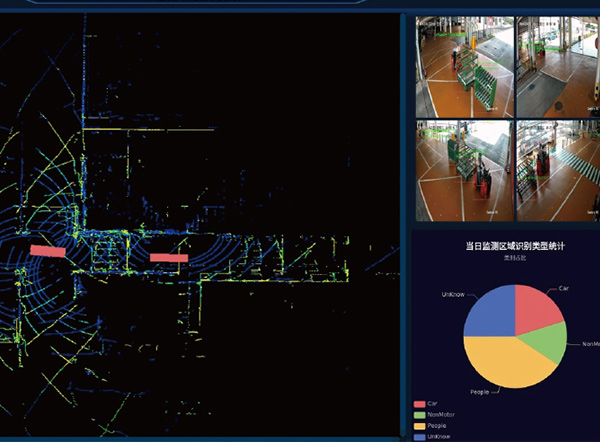
Составление карты
|
- Используйте C16 LiDAR для построения 3D-карты сцены;
|
|
- Площадь 3D-картографирования достигает миллиона квадратных метров (для этого требуется промышленный процессор с памятью 32 Гб, реализуемой за счет расширения);
|
|
- Разрешение сетки построения карты составляет 5 см;
|
|
- Когда на подвижное препятствие приходится не более 10% площади карты
то функция построения карты может быть реализована;
|
|
- Принудительная функция замкнутого цикла на основе глобальной картографической информации
алгоритм согласования;
|
|
- Функция глобальной инициализации (риск: похожая сцена может привести к ошибке позиционирования
ошибка).
|
|
Позиционирование
|
- В помещениях средняя точность позиционирования находится в пределах 2 см, а точность позиционирования точки задачи - в пределах 1 см;
|
|
- На больших открытых сценах средняя точность позиционирования составляет 3 см, а точность позиционирования точек задачи - 2 см;
|
|
- Поддерживайте стабильную точность позиционирования при условии, что
изменение окружающей среды не превышает 30%.
|
|
Вход и выход
|
Вход
|
- Исходные данные LiDAR, информация о положении IMU и вспомогательная информация одометра
информация (опционально) и информация GPS (опционально).
|
|
Выход
|
- Конечный вывод: Информация о позиционировании устройства (x,y,z,roll,pitch,yaw).
|
|
- Конечный вывод: Информация о позиционировании устройства (x,y,z,roll,pitch,yaw).
|
|
- Промежуточный вывод: Данные облака точек LiDAR, оценка соответствия облака точек, обновленная поза после закрытия петли, статус подключения датчиков и т. д.
|