LX-3D SLAM 매핑 및 포지셔닝 박스는 LSROBOT (LSLiDAR)에서 개발한 핵심 소프트웨어 및 하드웨어 제품입니다. 3D LiDAR를 메인 센서로 하여 LiDAR, IMU, 주행 거리계, GPS 및 기타 유형의 센서의 데이터 융합을 통해 고성능 프로세서와 함께 작동 환경의 매핑 및 위치 매칭을 달성합니다. 또한 이 제품에는 이더넷 통신 인터페이스가 장착되어 있어 다양한 운영 시나리오에서 사용자의 정밀한 위치 확인 요구를 충족합니다.
넓은 감지 범위와 고성능을 갖춘 C16 멀티라인 LiDAR
및 고성능 (다른 유형에 적용 가능
LiDAR 유형)
위치 센서 지원
IMU
퓨전 포지셔닝 지원
위치 센서 지원
주행 거리계
퓨전 포지셔닝 지원(옵션)
위치 센서 지원
GPS
실외 퓨전 포지셔닝 지원(옵션)
제품
기능
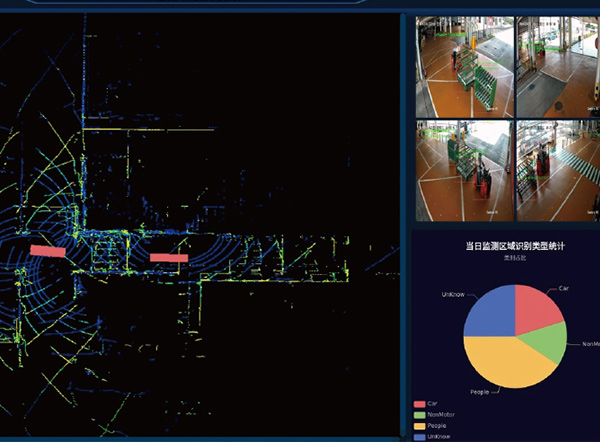
매핑
- C16 LiDAR를 사용하여 3D 씬 맵 구성을 완료합니다;
- 3D 매핑 영역은 백만 평방미터 규모에 이릅니다(32GB 메모리를 갖춘 산업용 프로세서가 필요하며 확장을 통해 구현됨);
- 지도 구성 격자의 해상도는 5cm입니다;
- 모바일 장애물이 지도 면적의 10% 이하를 차지할 때
면적을 차지하면 지도 구축 기능을 구현할 수 있습니다;
- 글로벌 지도 정보에 기반한 강제 폐쇄 루프 기능
매칭 알고리즘을 기반으로 한 강제 폐쇄 루프 기능;
- 글로벌 초기화 기능(위험: 유사한 장면으로 인해 위치 지정 오류
오류가 발생할 수 있음).
포지셔닝
- 실내 시나리오에서 평균 위치 정확도는 2cm 이내, 작업 지점 위치 정확도는 1cm 이내입니다;
- 넓은 야외 장면에서 평균 위치 정확도는 3cm 이내, 작업 지점 위치 정확도는 2cm 이내입니다;
- 환경 변화가 30%를 초과하지 않는 조건에서 안정적인 위치 정확도를 유지합니다.
환경 변화가 30%를 넘지 않는 조건에서 안정적인 위치 정확도를 유지합니다.
입력 및 출력
입력
- LiDAR 원시 데이터, IMU 자세 정보 및 주행 거리계 보조
정보(선택 사항) 및 GPS 정보(선택 사항).
출력
- 최종 출력: 장치 위치 정보(x, y, z, 롤, 피치, 요).
- 최종 출력: 장치 위치 정보(x, y, z, 롤, 피치, 요).
- 중간 출력: LiDAR 포인트 클라우드 데이터, 포인트 클라우드 매칭 점수, 루프 종료 후 업데이트된 포즈, 센서 연결 상태 등입니다.
무인 취급 장비 지능형 하드웨어
LSROBOT(LSLiDAR)의 지능형 하드웨어는 고성능 LiDAR, LiDAR 포지셔닝 박스, 충돌 경고 시스템, 3D SLAM 무인 지게차/AMR 도메인 컨트롤러를 포함합니다. 인식, 포지셔닝 및 내비게이션, 충돌 경고부터 전반적인 차량 제어에 이르기까지 이 제품들은 지능형 핸들링 장비의 핵심 기능 요구 사항을 포괄적으로 해결합니다. 무인 모바일 디바이스 제조업체 또는 지게차 OEM의 신속한 통합을 지원하여 효율적이고 안정적이며 안전한 무인 모바일 장비를 빠르게 개발할 수 있도록 도와줍니다.