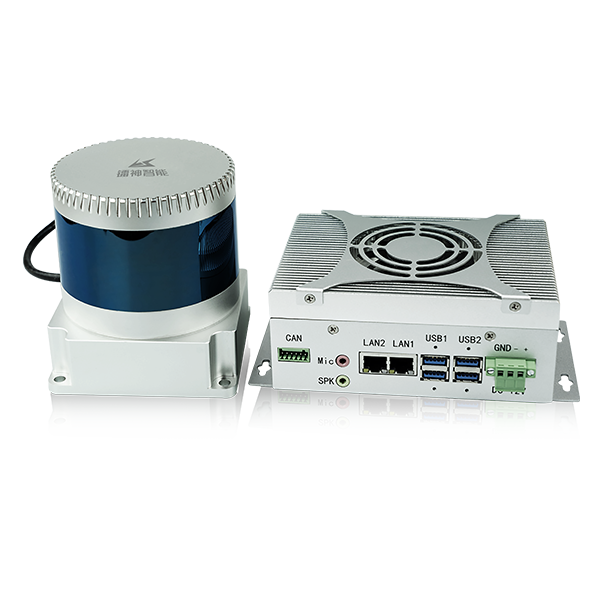
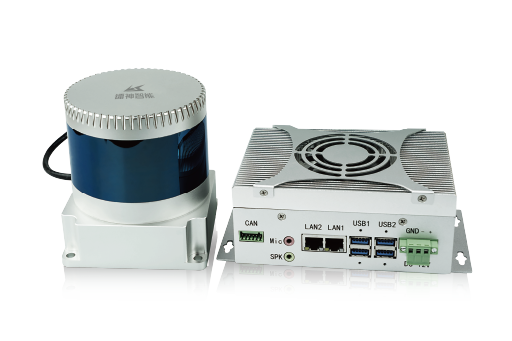
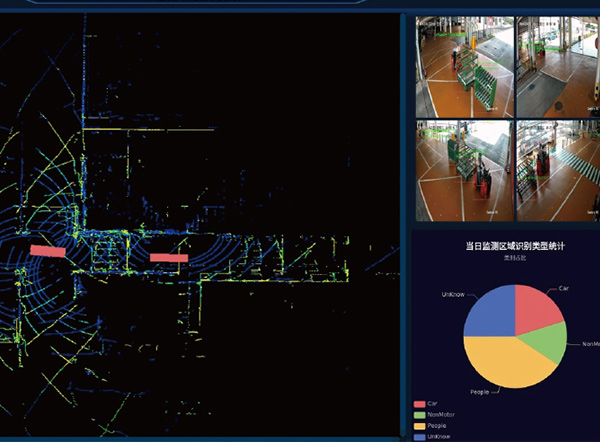
LX-3D SLAMマッピング&ポジショニングボックスは、LSROBOT(LSLiDAR)が開発したソフトウェアとハードウェアのコア製品です。3DLiDARをメインセンサーとし、LiDAR、IMU、走行距離計、GPS、その他各種センサーのデータフュージョンを通して、高性能プロセッサーと共に、操作環境のマッピングと位置照合を実現します。また、イーサネット通信インターフェースを装備しており、様々な操作シーンにおけるユーザーの正確な測位ニーズに応えます。
LSROBOT(LSLiDAR)のインテリジェントハードウェアは、高性能LiDAR、LiDARポジショニングボックス、衝突警告システム、3D SLAM無人フォークリフト/AMRドメインコントローラをカバーしています。知覚、位置決め、ナビゲーション、衝突警告から車両全体の制御まで、これらの製品はインテリジェント・ハンドリング機器の中核機能ニーズに包括的に対応しています。これらの製品は、無人移動装置メーカーやフォークリフトOEMの迅速な統合を可能にし、効率的で安定した安全な無人移動装置の迅速な開発を支援します。
3D SLAM無人フォークリフト /AMRドメインコントローラー
3D SLAMマッピングと ポジショニングボックス
LiDAR
安全に関する警告 ハードウェア
業界顧客