|
Hardware
Configuration
|
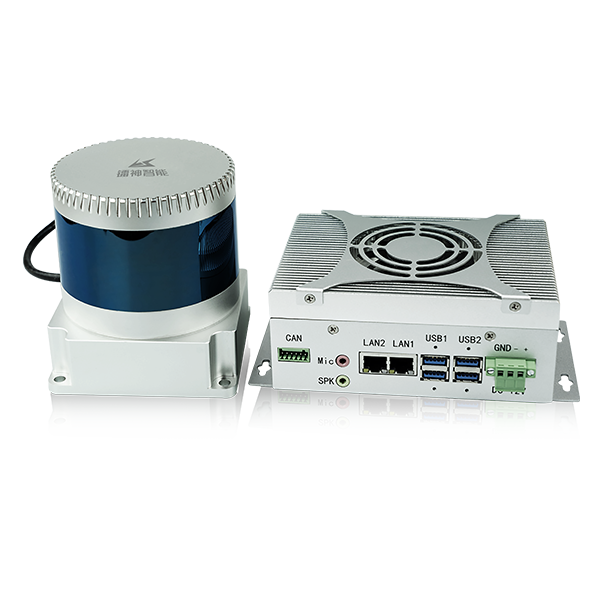
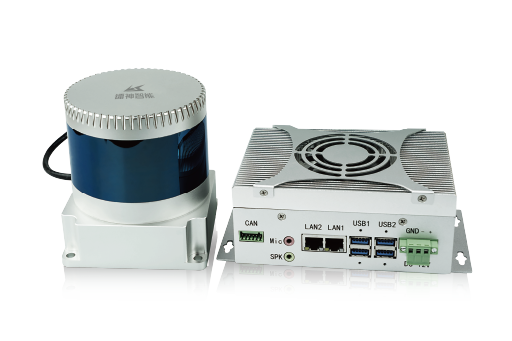
IPC Platform
|
IPC Processor
|
Sensor data acquisition and processing, mapping
and positioning computing power calculation
|
|
LiDAR
|
C16
|
C16 Multi-line LiDAR with wide detection range
and high performance (Can be adapted to other
types of LiDAR)
|
|
Supporting Positioning Sensor
|
IMU
|
Fusion Positioning Supporting
|
|
Supporting Positioning Sensor
|
Odometer
|
Fusion Positioning Supporting (Optional)
|
|
Supporting Positioning Sensor
|
GPS
|
Outdoor Fusion Positioning Supporting (Optional)
|
|
Product
Function
|
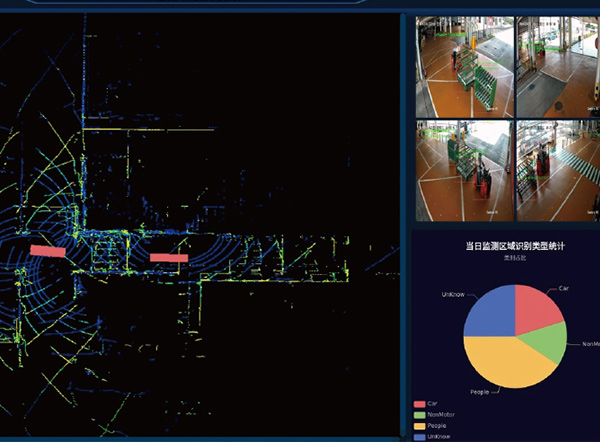
Mapping
|
· Use C16 LiDAR to complete 3D scene map construction;
|
|
· 3D mapping area reaches million-square-meter scale (requiring an industrial processor with 32GB memory, implemented through expansion);
|
|
· The resolution of the map construction grid is 5 cm;
|
|
· When the mobile obstacle accounts for no more than 10% of the map
area, the map building function can be realized;
|
|
· Forced closed-loop function based on global map information
matching algorithm;
|
|
· Global initialization function (risk: similar scene may cause positioning
error).
|
|
Positioning
|
· In indoor scenarios, the average positioning accuracy is within 2 cm, and the task-point positioning accuracy is within 1 cm;
|
|
· In large outdoor scenes, the average positioning accuracy is within 3 cm, and the task-point positioning accuracy is within 2 cm;
|
|
· Maintain stable positioning accuracy under the condition that the
environmental change is no more than 30%.
|
|
Input & Output
|
Input
|
· LiDAR raw data, IMU attitude information and odometer auxiliary
information (optional) and GPS information (Optional).
|
|
Output
|
· Final output: Device Positioning Information (x,y,z,roll,pitch,yaw).
|
|
· Final output: Device Positioning Information (x,y,z,roll,pitch,yaw).
|
|
· Intermediate output: LiDAR point cloud data, point cloud matching score, updated pose after loop closure, and sensor connection status, etc.
|