|
Matériel
Configuration de l'ordinateur
|
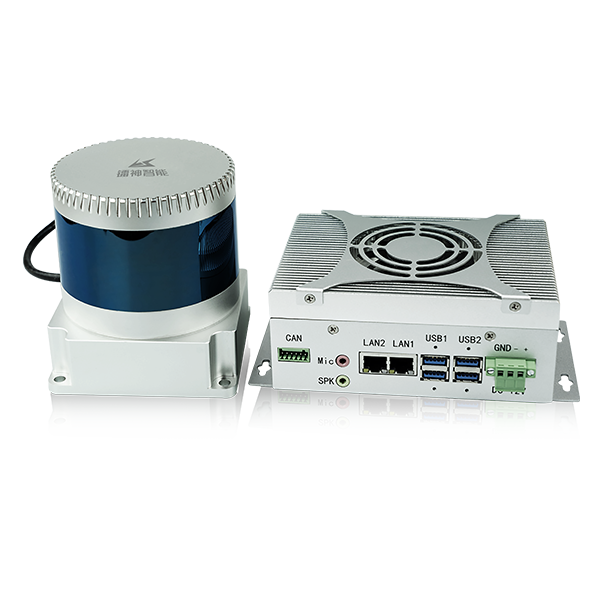
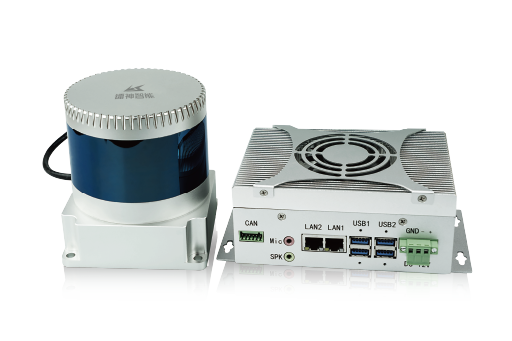
Plate-forme IPC
|
Processeur IPC
|
Acquisition et traitement des données des capteurs, cartographie
et de positionnement calcul de la puissance de calcul
|
|
LiDAR
|
C16
|
C16 Multi-line LiDAR avec une large plage de détection
et haute performance (peut être adapté à d'autres
types de LiDAR)
|
|
Capteur de positionnement de support
|
IMU
|
Positionnement de la fusion Soutien
|
|
Capteur de positionnement de support
|
Compteur kilométrique
|
Support de positionnement de la fusion (en option)
|
|
Capteur de positionnement de support
|
GPS
|
Support de positionnement de la fusion en extérieur (en option)
|
|
Produit
Fonction
|
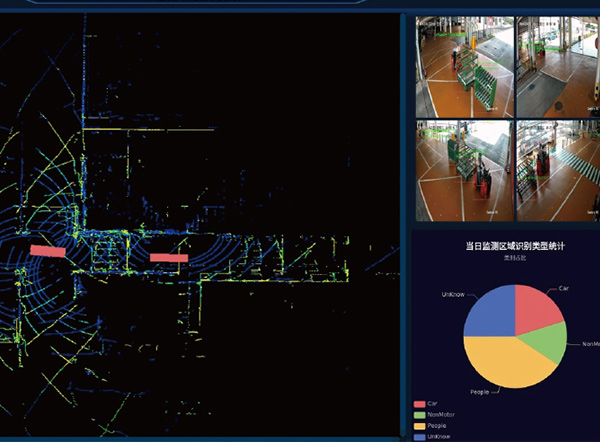
Cartographie
|
- Utilisez le C16 LiDAR pour terminer la construction de la carte de la scène 3D ;
|
|
- La zone de cartographie 3D atteint l'échelle du million de mètres carrés (nécessitant un processeur industriel avec une mémoire de 32 Go, mise en œuvre par extension) ;
|
|
- La résolution de la grille de construction de la carte est de 5 cm ;
|
|
- Lorsque l'obstacle mobile ne représente pas plus de 10% de la surface de la carte, la fonction de construction de la carte peut être réalisée.
la fonction de construction de la carte peut être réalisée ;
|
|
- Fonction forcée en boucle fermée basée sur l'information cartographique globale
algorithme de correspondance ;
|
|
- Fonction d'initialisation globale (risque : une scène similaire peut entraîner une erreur de positionnement).
de positionnement).
|
|
Positionnement
|
- En intérieur, la précision moyenne du positionnement est de l'ordre de 2 cm, et la précision du positionnement des points d'intervention est de l'ordre de 1 cm ;
|
|
- Dans les grandes scènes extérieures, la précision moyenne du positionnement est de 3 cm, et la précision du positionnement des points d'action est de 2 cm ;
|
|
- Maintenir une précision de positionnement stable à condition que le changement environnemental ne soit pas supérieur à 30%.
de l'environnement ne dépasse pas 30%.
|
|
Entrée et sortie
|
Entrée
|
- données brutes LiDAR, informations sur l'attitude de l'IMU et informations auxiliaires de l'odomètre
informations auxiliaires (en option) et informations GPS (en option).
|
|
Sortie
|
- Résultat final : Informations sur le positionnement de l'appareil (x,y,z,roll,pitch,yaw).
|
|
- Résultat final : Informations sur le positionnement de l'appareil (x,y,z,roll,pitch,yaw).
|
|
- Sortie intermédiaire : Données du nuage de points LiDAR, score de correspondance du nuage de points, position mise à jour après la fermeture de la boucle, état de la connexion des capteurs, etc.
|