|
Hardware
Configuración
|
Plataforma CIP
|
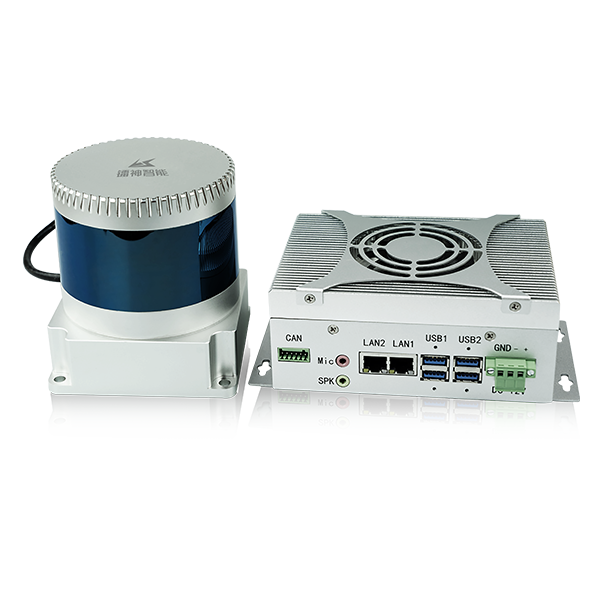
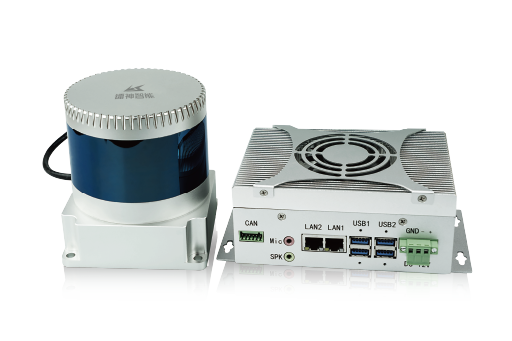
Procesador IPC
|
Adquisición y procesamiento de datos de sensores, cartografía
y posicionamiento cálculo de la potencia de cálculo
|
|
LiDAR
|
C16
|
C16 LiDAR multilínea con amplio rango de detección
y alto rendimiento (Se puede adaptar a otros
tipos de LiDAR)
|
|
Sensor de posicionamiento de apoyo
|
IMU
|
Fusión Posicionamiento Apoyo
|
|
Sensor de posicionamiento de apoyo
|
Cuentakilómetros
|
Soporte de posicionamiento de fusión (opcional)
|
|
Sensor de posicionamiento de apoyo
|
GPS
|
Soporte de posicionamiento Fusion para exteriores (opcional)
|
|
Producto
Función
|
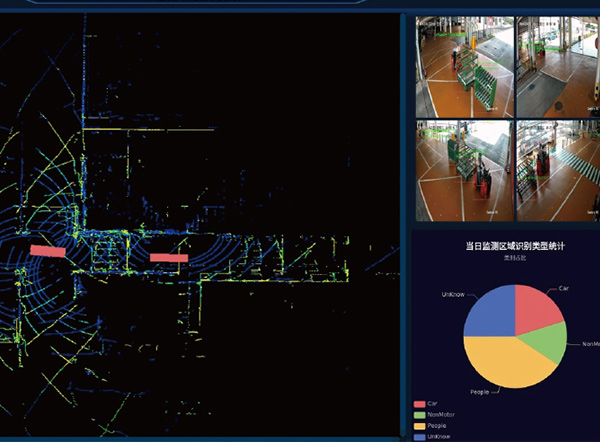
Cartografía
|
- Utiliza C16 LiDAR para completar la construcción del mapa de escena 3D;
|
|
- El área de cartografía 3D alcanza la escala del millón de metros cuadrados (requiere un procesador industrial con 32 GB de memoria, implementado mediante ampliación);
|
|
- La resolución de la cuadrícula de construcción del mapa es de 5 cm;
|
|
- Cuando el obstáculo móvil no representa más de 10% del área del mapa
se puede realizar la función de construcción del mapa;
|
|
- Función de bucle cerrado forzado basada en información cartográfica global
algoritmo de correspondencia;
|
|
- Función de inicialización global (riesgo: una escena similar puede causar un error de posicionamiento).
error de posicionamiento).
|
|
Posicionamiento
|
- En interiores, la precisión media de posicionamiento es de 2 cm y la precisión de posicionamiento de los puntos de tarea es de 1 cm;
|
|
- En escenas exteriores de gran tamaño, la precisión media de posicionamiento es de 3 cm, y la precisión de posicionamiento de los puntos de tarea es de 2 cm;
|
|
- Mantener una precisión de posicionamiento estable bajo la condición de que el
cambio ambiental no sea superior a 30%.
|
|
Entrada y salida
|
Entrada
|
- LiDAR datos brutos, información de actitud IMU y cuentakilómetros auxiliar
(opcional) e información GPS (opcional).
|
|
Salida
|
- Salida final: Información de posicionamiento del dispositivo (x,y,z,roll,pitch,yaw).
|
|
- Salida final: Información de posicionamiento del dispositivo (x,y,z,roll,pitch,yaw).
|
|
- Salida intermedia: Datos de la nube de puntos LiDAR, puntuación de coincidencia de la nube de puntos, pose actualizada tras el cierre del bucle y estado de conexión de los sensores, etc.
|