تمكين مصنعي المعدات المتنقلة غير المأهولة و
مصنعي المعدات المتنقلة غير المأهولة
توفير حلول كاملة السيناريو للتصنيع الذكي والخدمات اللوجستية
صندوق رسم الخرائط وتحديد المواقع (3D SLAM)
صندوق LX-3D SLAM لرسم الخرائط وتحديد المواقع هو منتج برمجيات وأجهزة أساسية تم تطويره بواسطة LSROBOT (LSLiDAR). مع جهاز LiDAR ثلاثي الأبعاد LiDAR كمستشعر رئيسي، من خلال دمج بيانات LiDAR، ووحدة القياس الدولي IMU، وعداد المسافات، ونظام تحديد المواقع العالمي وأنواع أخرى من أجهزة الاستشعار، ومع المعالج عالي الأداء، فإنه يحقق رسم الخرائط ومطابقة الموقع لبيئة التشغيل. تم تجهيز المنتج أيضًا بواجهة اتصال Ethernet لتلبية احتياجات تحديد المواقع الدقيقة للمستخدم في سيناريوهات التشغيل المختلفة.
الحصول على بيانات المستشعر ومعالجتها، ورسم الخرائط
وحساب القدرة الحاسوبية لتحديد المواقع
LiDAR
C16
C16 متعدد الخطوط LiDAR متعدد الخطوط مع نطاق كشف واسع
وأداء عالٍ (يمكن تكييفها مع أنواع أخرى من
أنواع أخرى من LiDAR)
دعم مستشعر تحديد المواقع الداعم
وحدة IMU
دعم تحديد المواقع الاندماج
دعم مستشعر تحديد المواقع الداعم
عداد المسافات
دعم تحديد المواقع الاندماج (اختياري)
دعم مستشعر تحديد المواقع الداعم
نظام تحديد المواقع العالمي (GPS)
دعم تحديد المواقع الانصهار في الهواء الطلق (اختياري)
المنتج
الوظيفة
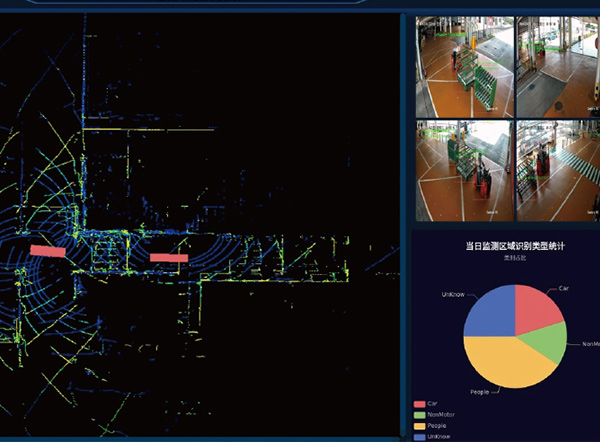
رسم الخرائط
- استخدم C16 LiDAR لإكمال بناء خريطة المشهد ثلاثية الأبعاد;
- تصل مساحة رسم الخرائط ثلاثية الأبعاد إلى مليون متر مربع (تتطلب معالجًا صناعيًا بذاكرة 32 جيجابايت، يتم تنفيذه من خلال التوسعة);
- تبلغ دقة شبكة بناء الخريطة 5 سم;
- عندما لا يمثل العائق المتحرك أكثر من 10% من الخريطة
يمكن تحقيق وظيفة بناء الخريطة;
- دالة الحلقة المغلقة الإجبارية القائمة على معلومات الخريطة العالمية
خوارزمية المطابقة;
- دالة التهيئة العالمية (الخطر: قد يتسبب المشهد المماثل في حدوث
خطأ).
التموضع
- في السيناريوهات الداخلية، يبلغ متوسط دقة تحديد الموقع في حدود 2 سم، ودقة تحديد موقع نقطة المهمة في حدود 1 سم;
- في المشاهد الخارجية الكبيرة، يكون متوسط دقة تحديد الموقع في حدود 3 سم، ودقة تحديد موقع نقطة المهمة في حدود 2 سم;
- الحفاظ على دقة تحديد المواقع المستقرة في حالة أن
لا يزيد التغير البيئي عن 30%.
المدخلات والمخرجات
المدخلات
- البيانات الخام LiDAR، ومعلومات موقف وحدة القياس الدولية ومعلومات عداد المسافات الإضافية
(اختياري) ومعلومات GPS (اختياري).
المخرجات
- الإخراج النهائي: معلومات تحديد موقع الجهاز (س، ص، ض، لفة، انحدار، انحراف، انحراف).
- الإخراج النهائي: معلومات تحديد موقع الجهاز (س، ص، ض، لفة، انحدار، انحراف، انحراف).
- مخرجات وسيطة: بيانات سحابة النقاط LiDAR، ودرجة مطابقة سحابة النقاط، والوضعية المحدّثة بعد إغلاق الحلقة، وحالة اتصال المستشعر، إلخ.
الأجهزة الذكية لمعدات المناولة غير المأهولة
تغطي أجهزة LSROBOT1T (LSLiDAR) الذكية أجهزة LiDAR عالية الأداء، وصناديق تحديد المواقع LiDAR، وأنظمة التحذير من الاصطدام، وأجهزة التحكم في مجال الرافعة الشوكية غير المأهولة/المناولة الآلية ثلاثية الأبعاد. من الإدراك، وتحديد المواقع والملاحة، والتحذير من التصادم إلى التحكم الشامل في المركبة، تلبي هذه المنتجات بشكل شامل الاحتياجات الوظيفية الأساسية لمعدات المناولة الذكية. كما أنها تتيح التكامل السريع لمصنعي الأجهزة المتحركة غير المأهولة أو مصنعي المعدات الأصلية للرافعات الشوكية، مما يساعدهم على تطوير معدات متنقلة غير مأهولة تتسم بالكفاءة والاستقرار والأمان بسرعة.
التحكم الكلي
رافعة شوكية غير مأهولة 3D SLAM
وحدة تحكم المجال /AMR
تحديد المواقع والملاحة
رسم خرائط SLAM ثلاثي الأبعاد و
صندوق تحديد المواقع
الإدراك البيئي
LiDAR
حماية السلامة
تحذير السلامة
الأجهزة
ذكي
نظام الأجهزة
التمكين
غير المأهولة
المعدات
طورت أول رافعة شوكية غير مأهولة 3D SLAM في عام 2019
البحث عن شركاء عالميين للنهوض بالخدمات اللوجستية الذكية معاً!